14. DO : Lab- Dex-Net 2.0 Code
Introduction
Now that you have read the paper on Dex-Net 2.0 and watched the lecture by Ken Goldberg, you may want to see if you can explore these concepts yourself. Luckily, the folks at UC Berkeley have open-sourced a large portion of their work for the general public. Below are a list of resources you may find useful if you would like to recreate (or experiment with) concepts in robot grasping. For more information on Dex-Net 2.0 please look here.
Suggestions for Exploration
- Try to find the optimal location of where to grab five (5) objects.
- See if you can re-create the grasp robustness show in Figure 9.
- Build a robotic arm and run Dex-Net 2.0 on this arm and evaluate the performance with your robot. Are your results the same? Why or why not? Do you think having better materials (e.g better servos, more feedback in the gripper, etc.) would improve results?
Datasets
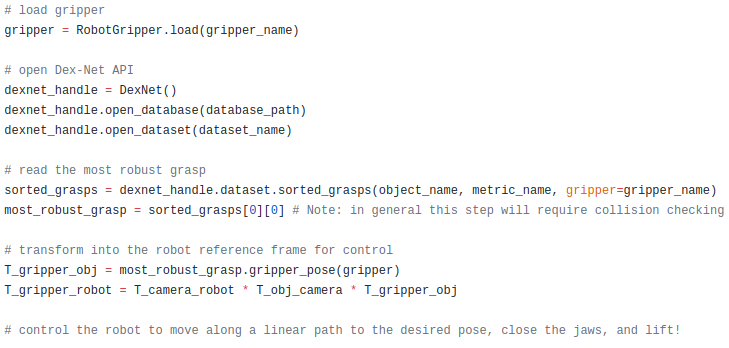
Code
Documentation